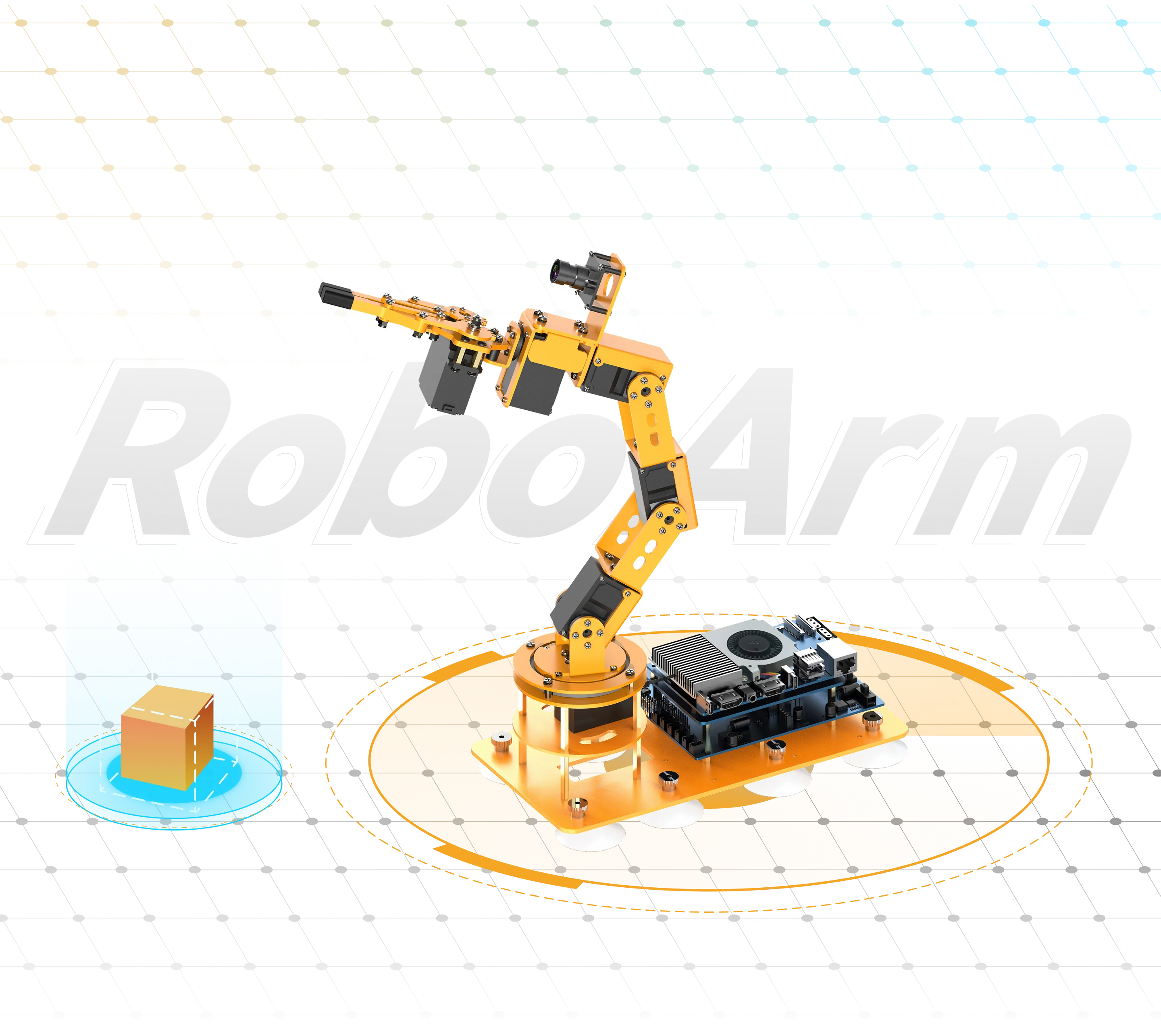
OrangeAI 智能视觉机械臂
RoboArm
OrangePi Alpro(8T)/OrangePi 5 Pro
OpenCV

手眼合一

颜色识别
目标追踪
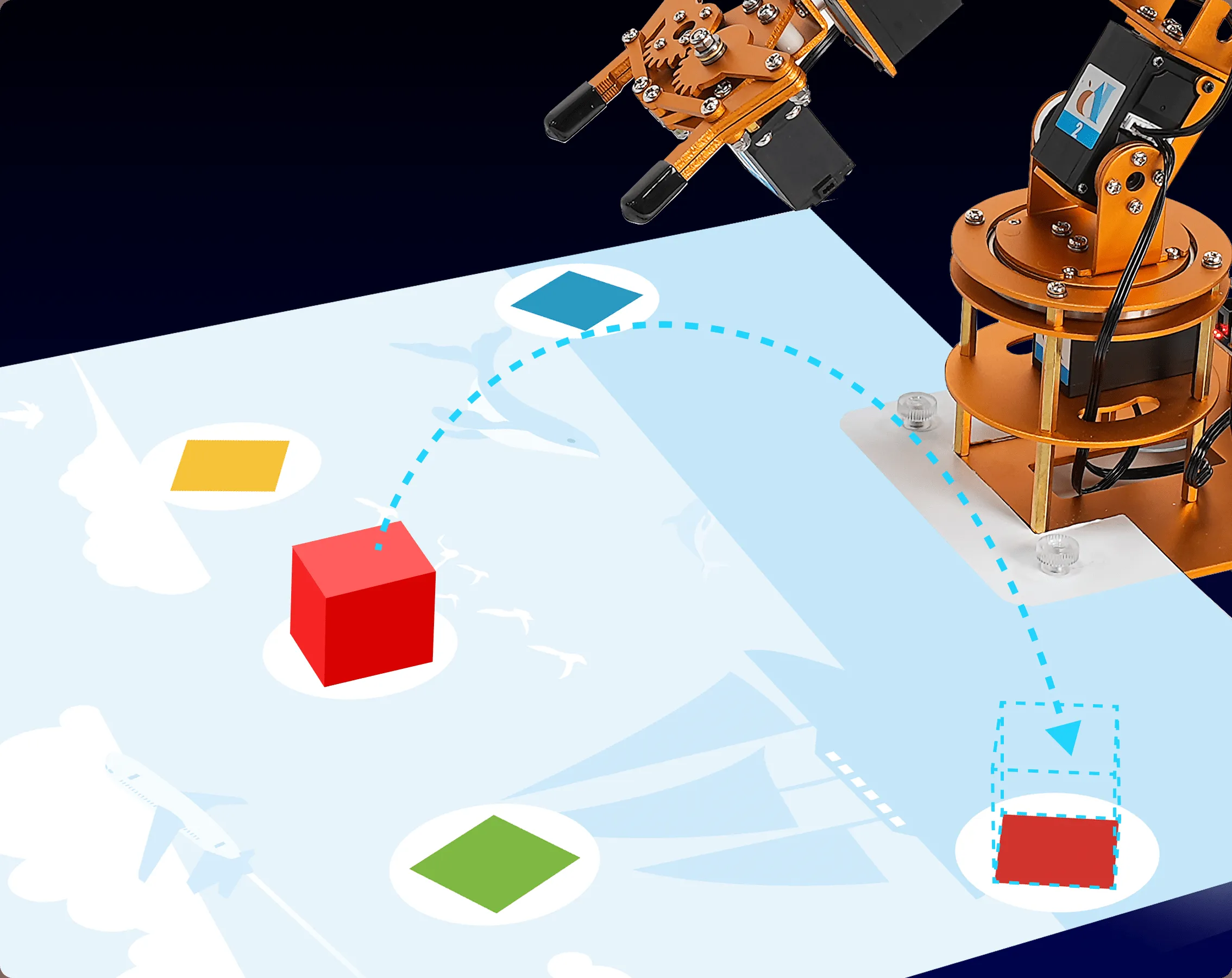
智能分拣
OrangeAI智能视觉机械臂以OrangePi AIpro(8T)/OrangePi 5 Pro为主控,搭载USB摄像头,能实现颜色识别、智能物体分栋、目标追踪等功能。通过ROS2机器人操控系统,为机器人开发提供跨平台、跨语言的开发环境。
OrangeAI智能视觉机械臂采用Python编程,配备详细的教程资料,带您轻松学习机器人技术和机器视觉,让您可以快速搭建机器视觉编程环境,玩转AI人工智能。


眼随手动
手眼合一
搭载一个6自由度机械臂,可以轻松抓取和分拣目标物品。搭载USB摄像头,眼随手动,手眼合一。
AI视觉识别
目标追踪
以OpenCV为图像处理库,利用USB摄像头对目标物品进行颜色识别和坐标定位,实现智能物体分拣、目标追踪等人工智能操作。

实时视频传输
体验真实
手机APP实时传输摄像头画面,遥控体验真实而充满乐趣。
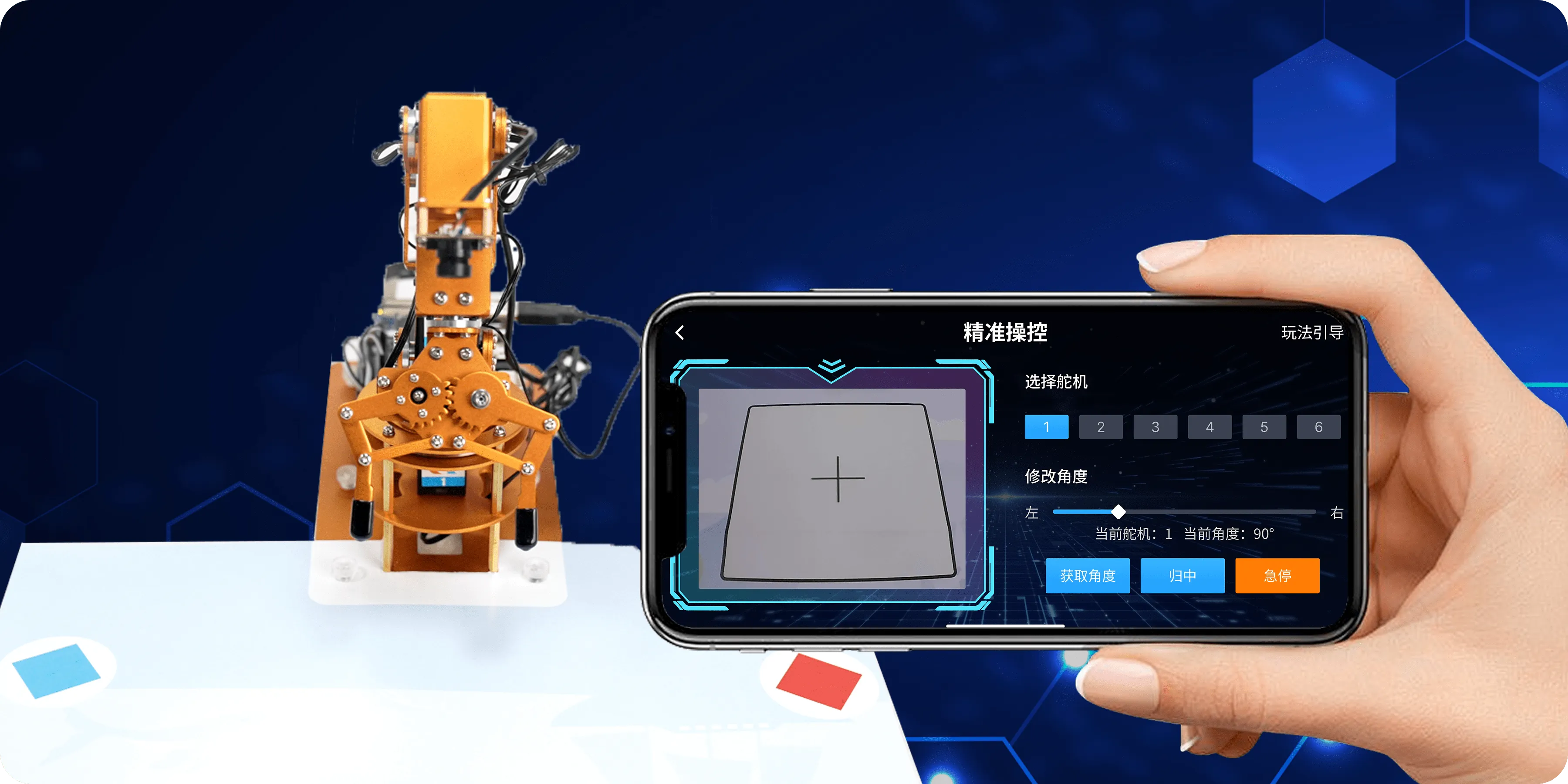
双线互联
方便快捷
支持有线和无线连接。机械臂开启时已经默认开启NAT模式的Wi-Fi热点,点击连接热点,即可与机械臂连接成功。


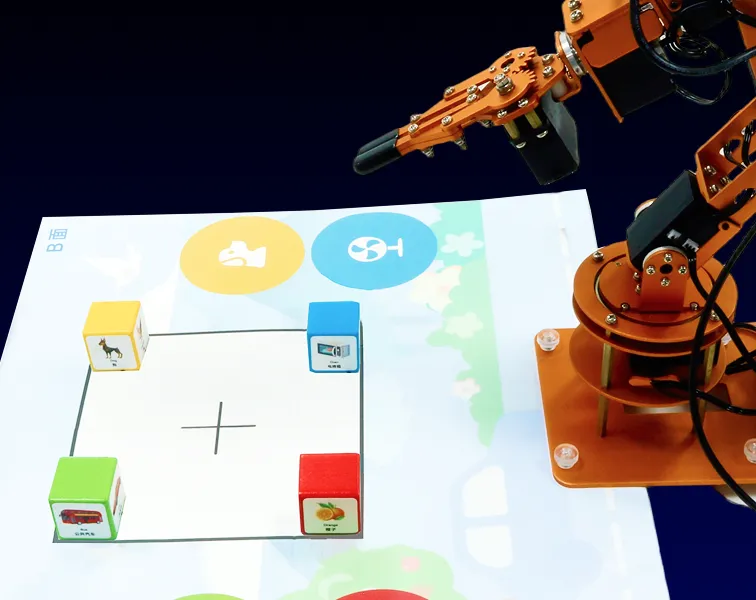
色彩互动
色块归位
识别积木的颜色并将积木放置在地图的对应颜色区域中

色块抓取
抓取用户在APP上选择的颜色的积木并放置在地图中的准备区域

色块堆叠
按照APP上设置颜色的抓取顺序将对应的积木抓取至准备区域并堆叠

色彩确认
识别用户放在准备区域的积木的颜色,如果是用户在App端选择的颜色,机械臂将点头确认,如果不是则会摇头
智眼追踪

色块追踪
将积木块放在机器人的摄像头前,机器人将识别积木的颜色,如果是用户在APP上选择的颜色,机器人将跟随积木移动;如果不是,机器人则不会跟随。
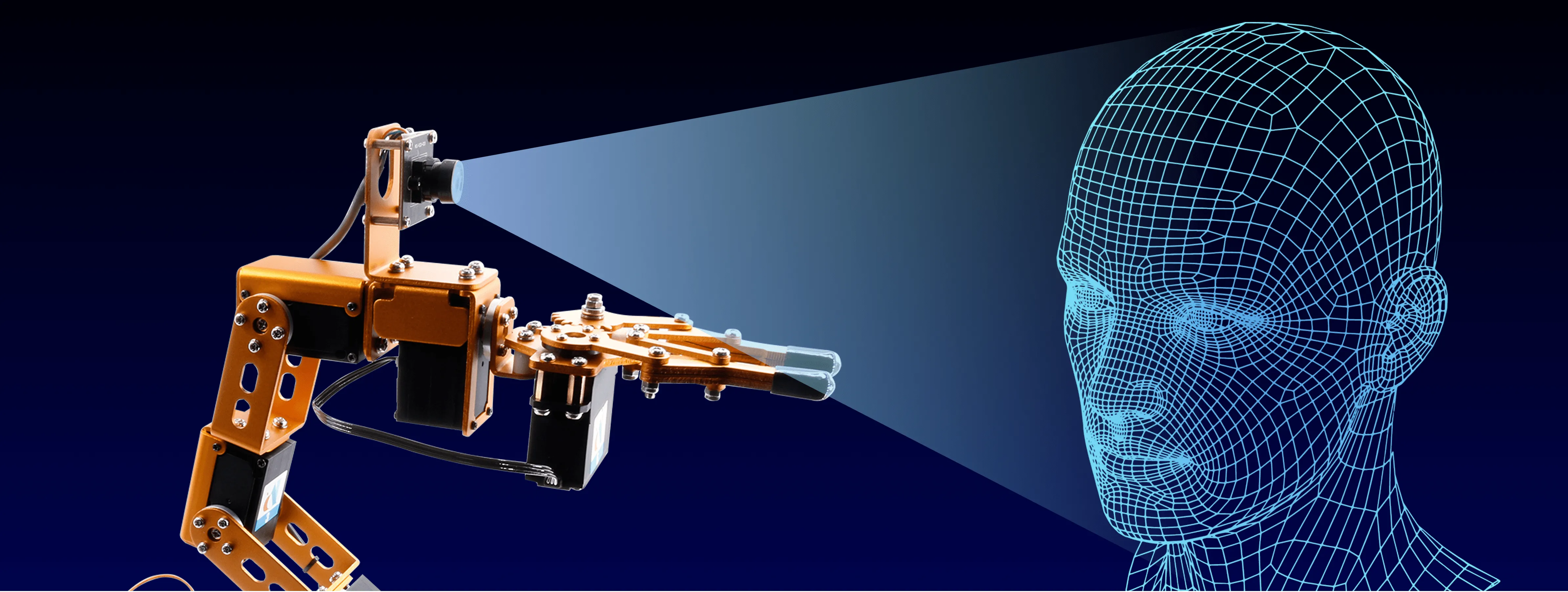
人脸追踪
检测当前画面是否有人脸,识别到人脸后机械臂将持续追踪人脸的位置

物体追踪
将贴有物体图片的积木块放在机器人的摄像头前,机器人将识别图片的类型,如果是用户在APP上选择的物体,机器人将跟随积木移动;如果不是,机器人则不会跟随。共支持16种物体识别与追踪。
智慧分拣
色块分拣
识别积木的颜色并将积木抓取至地图对应的颜色分类框中
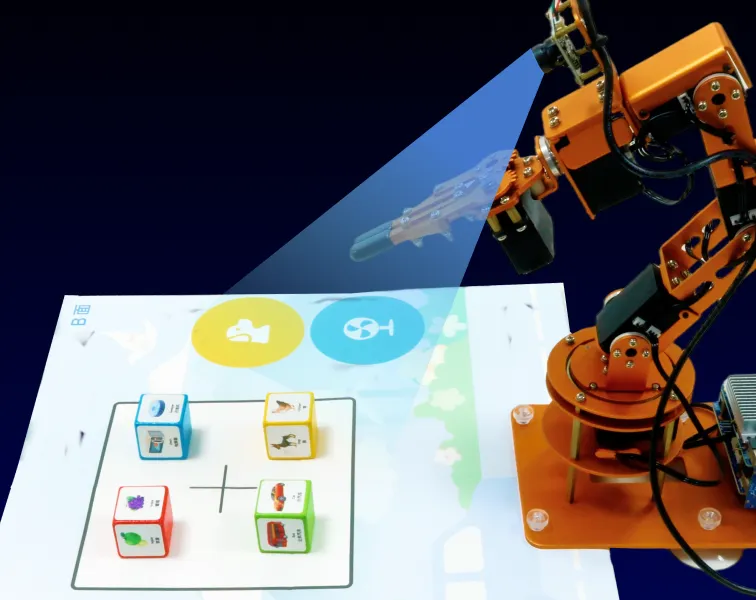
物体分拣
识别积木贴纸的物体并将积木抓取至地图对应的物体分类框中
物体分类

识别积木贴纸上的物体并在APP上显示物体名称与物体类型结果
动作编排

预置动作
提供9个预置动作组,点击运行后,开始执行。

自定义动作
可以让机械臂学习并执行动作组。机械臂会把当前的姿态记录为一个动作,最多可记录20个动作。

● 两种主控可选
主控型号
Orange Pi 5 Pro
Orange Pi Alpro(8T)
SOC/CPU
Rockchip RK3588S,8核(4×A76 @2.4GHz + 4×A55 @1.8GHz)
4核64位处理器 + AI处理器
GPU
ARM Mali-G610,支持 OpenGL ES 1.1/2.0/3.2、OpenCL 2.2、Vulkan 1.2
集成图形处理器
AI算力
6 TOPS NPU,支持 INT4/INT8/INT16混合运算
8 TOPS
内存
LPDDR5,4GB/8GB/16GB可选
LPDDR4X,8GB/16GB可选,3200Mbps
存储
eMMC插座和板载SPI Flash(空贴)⼆选⼀、MicroSD插槽、M.2 M-KEY(NVMe/SATA SSD)
SPI Flash 32MB、M.2 2280(SATA/NVMe)、eMMC插槽:32GB/64GB/128GB/256GB(可选),eMMC5.1 HS400、TF插槽
视频输出
HDMI2.1(8K@60Hz)、HDMI2.0(4K@60Hz)、MIPI 4 Lane(4K@60Hz)
2×HDMI2.0(4K@60FPS)、1×2 lane MIPI DSI
摄像头
2×MIPI CSI 4 Lane
2×2-lane MIPI CSI,兼容树莓派摄像头
USB接口
USB3.1 Gen1×1、USB2.0×1、USB2.0 HUB×4(Type A+排针)
USB 3.0 HOST×2、USB Type-C 3.0×1、Micro USB(串口打印)
网络连接
千兆以太网,支持PoE+;Wi-Fi 5 + BT 5.0/BLE(AP6256)
千兆以太网;Wi-Fi 5双频;BT4.2/BLE
音频
ES8388 CODEC,3.5mm耳机孔,板载MIC,HDMI 2.1 eARC
3.5mm耳机孔音频输入/输出
扩展接口
40PIN双排插针,支持UART、PWM、I2C、SPI、CAN、GPIO等
40PIN扩展接口,支持GPIO、UART、I2C、SPI、PWM
按键
MaskROM、RESET、POWER各1个
关机键×1、RESET×1、启动方式拨动键×2、烧录按键×1
供电
Type-C 5V@5A
Type-C PD 20V IN,标准65W
尺寸与重量
89×56×1.6mm,62g
107×68×1.6mm,82g
操作系统支持
Orangepi OS(Droid/Arch/OH)、Ubuntu、Debian、Android12
Ubuntu、openEuler
其他接口
风扇接口(5V 2PIN)、RTC接口(3V 2PIN)、调试串口(在40PIN内)、RGB LED
风扇接口×1、2PIN电池接口
RoboArm机械臂提供OrangePi Alpro(8T)与Orange Pi 5 Pro两种主控,且 使用方法基本一致。我们提供的课程资料、产品功能玩法、控制软件均一致。
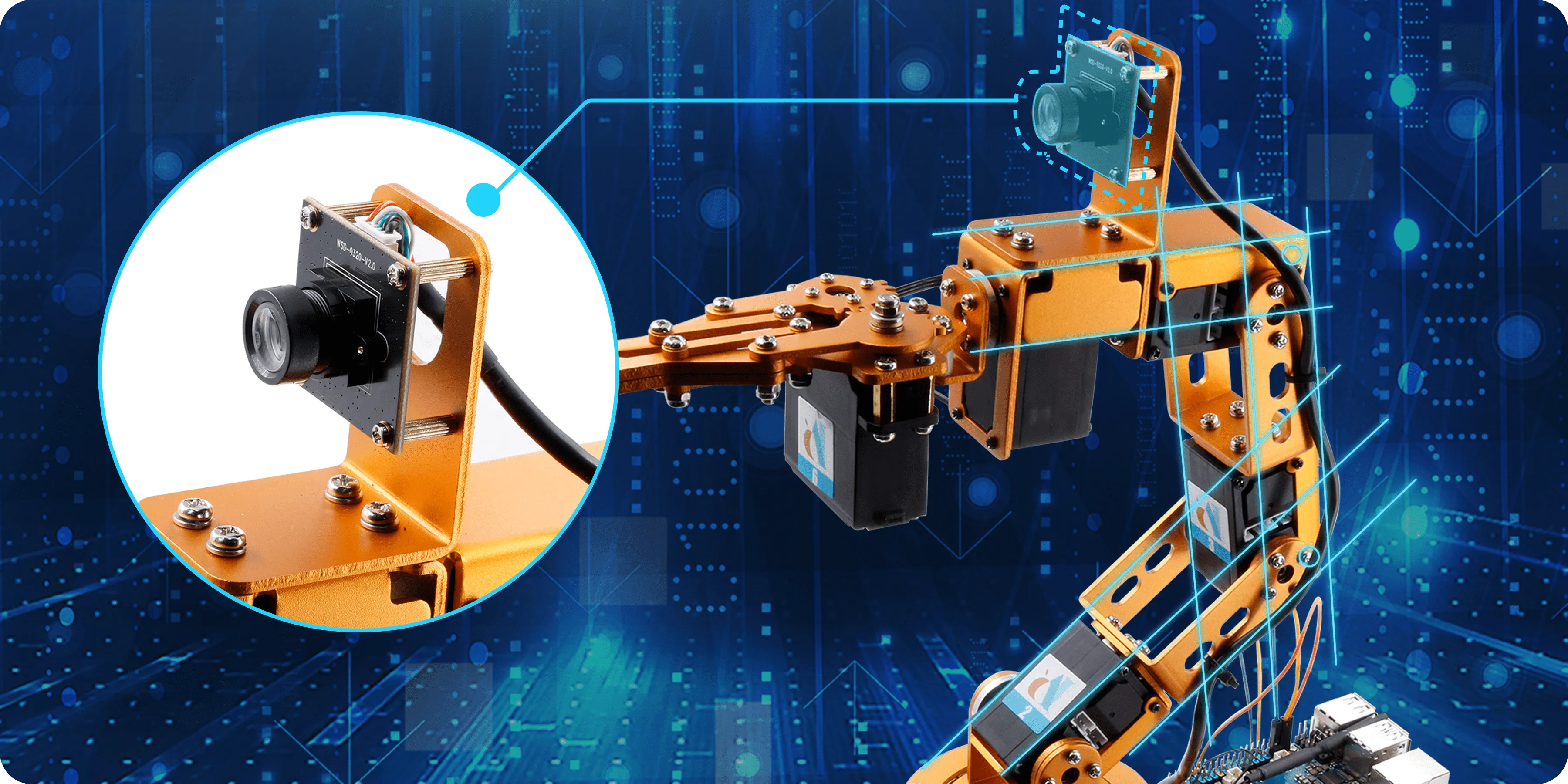
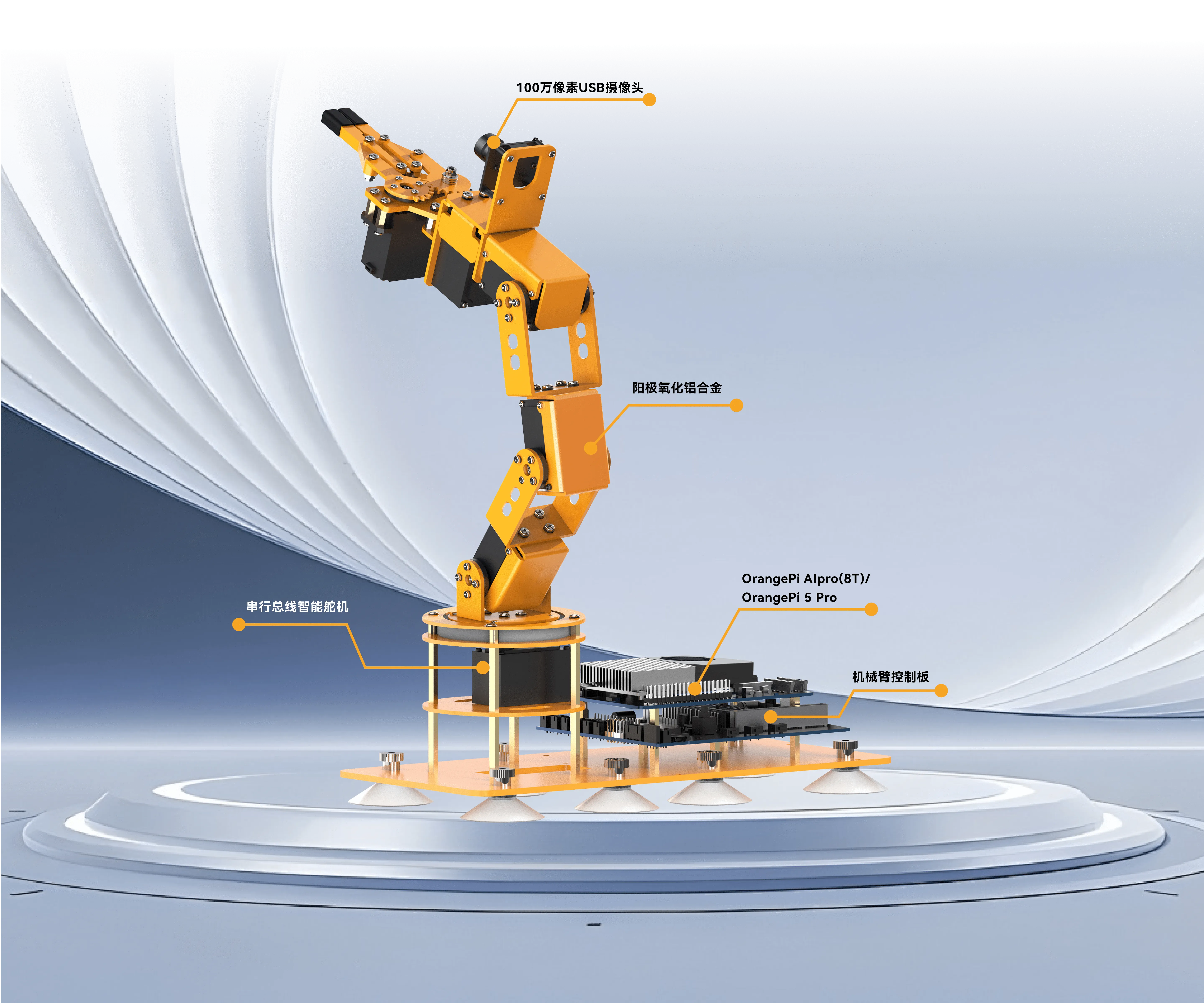
● USB摄像头

配备100万像素USB摄像头,支持720p@30fps视频采集,并具备150°广视角,可为机械臂的视觉识别系统提供宽域、流畅的画面,同时其定焦镜头保证了成像的稳定与清晰。
像素
100万像素
视场角
150°
分辨率
720P
帧率
30fps
连接方式
USB 2.0直连
对焦方式
固定焦距
● 方便二次开发
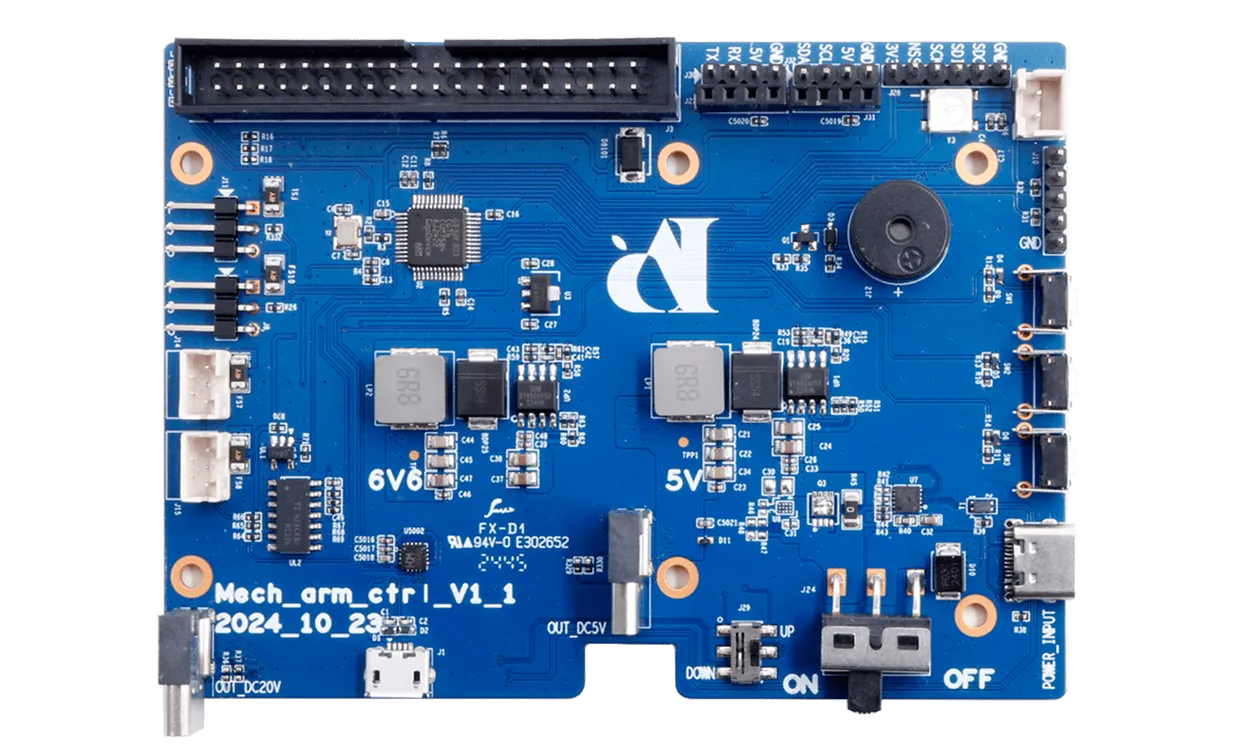
机械臂全功能控制板,支持驱动串口总线舵机与PWM舵机,具有串口、I2C控制接口、SPI控制接口、5V输出接口,提供机械臂控制通讯协议,方便二次开发。
● 开箱上手
说明书
● 组装教程
安装视频
● linux基础
1、 linux系统简介
2、 SSH远程控制
3、 Ubuntu文件系统
4、 Ubuntu常用命令
5、 Ubuntu常用编辑器
6、 Ubuntu软件 操作命令
7、 wifi和热点
8、 备份系统镜像
9、 查看系统版本信息
10、自定义服务管理
11、 底板驱动和通讯配置
● JupyterLab使用教程
1、 Jupyterlab环境搭建教程
2、 JupyterLab基本使用教程
3、 Jupyterwidgets配置教程
4、 Jupyterwidgets控件使用入门教程
● 遥控教程-香橙派
1、 手机app遥控
2、 有线手柄控制
● 开发前准备
1、 结束出厂大程序进程
2、 启动JupyterLab
3、 JupyterLab基本使用教程
4、 切换root用户
● 香橙派基础使用课程
1、 香橙派简介
2、 香橙派系统镜像的下载和烧录
3、 香橙派系统备份
4、 香橙派系统启动
5、 常用命令以及vim编辑器的使用
6、 香橙派使用注意事项
7、 安装香橙派配置工具raspi-config
8、 远程SSH登录香橙派
9、 更换系统软件源
10、香橙派与windows电脑传输文件
11、测试I2C
12、获取香橙派实时温度
13、安装Opencv-Python
14、安装机器人操作系 统ROS
15、设置开机自启动
● Python编程基础-香橙派
1、 python环境搭建
2、 helloworld
3、 引脚输出高低电平
4、 读取引脚高低电平
5、 输出pwm
● 基础控制教程
1、 控制RGB灯
2、 控制蜂鸣器
3、 控制单个舵机
4、 读取舵机当前的位置
5、 一次控制6个舵机
6、 机械臂上下左右摆动
7、 机械臂跳舞
8、 USB摄像头显示
● OpenCV课程
1、 OpenCV简介
2、 OpenCV入门--OpenCV安装
3、 OpencvCV入门--图片读取与展示
4、 OpencvCV入门--图片写入
5、 OpencvCV入门--像素操作
6、 图像处理--图片缩放
7、 图像处理--图片剪切
8、 图像处理--图片平移
9、 图像处理--图片镜像
10、图像处理--图片旋转
11、图像处理--仿射变换
12、图像处理--透视变换
13、图像处理--灰度处理
14、图像处理--图像二值化
15、图像处理--边缘检测
16、图像处理--线段绘制
17、图像处理--矩形圆形绘制
18、图像处理--文字图片绘制
● AI视觉基础
1、 颜色阈值调节色块校准
2、 颜色识别
3、 人脸识别
4、 yolov5模型训练
5、 pt模型转om模型
6、 yolo物体识别
● AI视觉追踪
1、 PID 算法基础
2、 色块定位实验
3、 色块追踪实验
4、 人脸定位实验
5、 人脸追踪实验
● AI视觉抓取
1、 颜色识别抓取积木
2、 你放我抓
3、 颜色分抹
4、 颜色堆叠
5、 物体分类
6、 引蛇出洞
● ROS2基础教程
1、 ROS2简介
2、 ROS2安装
3、 ROS2节点
4、 ROS2工作空间和功能包
5、 ROS2编译
6、 ROS2话题发布者
7、 ROS2话题订阅者
8、 ROS2服务服务端
9、 ROS2服务客户端
10、ROS2自定义msg和srv文件
11、ROS2类中使用参数
12、用ros2doctor识别问题
13、ROS2编写动作服务器和客户端
14、ROS2-节点管理launch文件
15、ROS2-节点记录仪rosbag2
16、ROS2-RQT工具
17、ROS2-RVIZ2介绍
18、ROS2-Gazebo介绍
19、ROS2-TF变换
20、ROS2-URDF介绍
21、ROS2生命周期管理
● ROS+Opencv
1、 QR二维码的创建
2、 QR二维码的识别
3、 人体姿态估计和物体检测
4、 相机标定
5、 AR视觉
6、 Opencv应用--人脸检测
7、 Opencv应用--人脸识别
8、 Opencv应用--人体检测算法
9、 Opencv应用--harris角点检测
10、Opencv应用--轮廓矩
11、Opencv应用--多边形轮廓
12、Opencv应用--离散傅里叶变换算法
13、Opencv应用--边缘检测算法
14、Opencv应用--Farneback光流检测算法
15、Opencv应用--LK光流检测算法
16、Opencv应用--轮廓检测
17、Opencv应用--RGB颜色过滤
18、Opencv应用--HSV颜色过滤
19、Opencv应用--HLS颜色过滤
20、Opencv应用--霍夫圆检测
21、Opencv应用--霍夫直线检测
22、Opencv应用--相位相关位移检测
23、Opencv应用--图像金字塔采样算法
24、Opencv应用--清除背景检测算法
25、Opencv应用--分水岭分割算法
26、Opencv应用--平滑滤波算法
27、Opencv应用--國值图像处理
● Mediapipe开发
1、 手部检测
2、 姿态检测
3、 整体检测
4、 面部检测
5、 人脸识别
6、 人脸特效
7、 三维物体识别
8、 绘画
9、 手指控制
10、手势识别
11、手势控制机械臂动作组
12、手势识别控制机械臂堆叠
13、手掌手臂目标定位
14、手臂姿态控制机械臂
15、识别追踪手掌控制机械臂
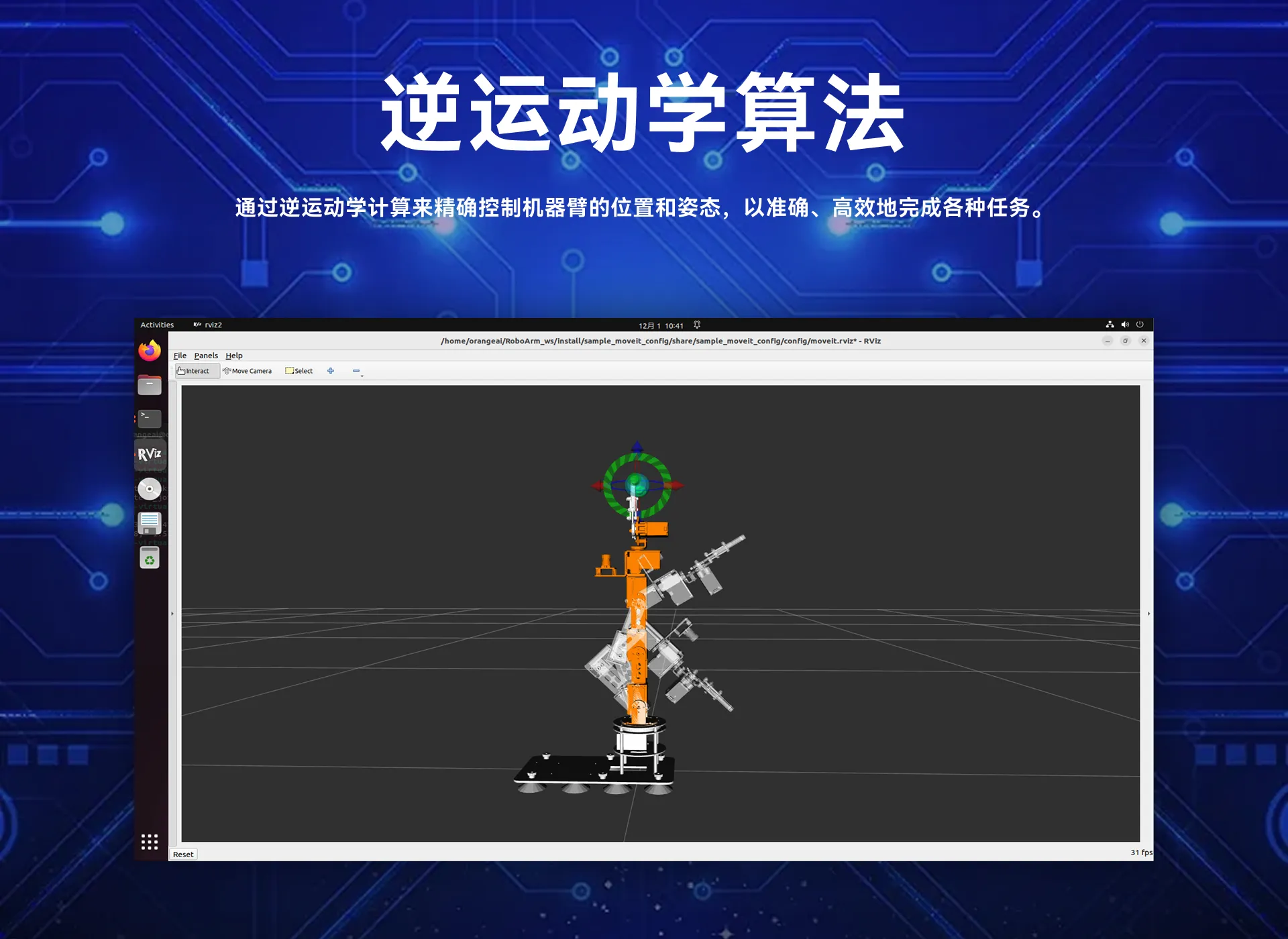
● 运动学进阶课程
1、 虚拟机安装环境部署
2、 Movelt2配置
3、 Movelt2注意事项
4、 Movelt2测试fk解算
5、 Movelt2测试ik解算
6、 Movelt2测试夹爪控制
7、 Movelt2测试关节角度控制
8、 Movelt2测试pose控制
9、 Movelt2测试真机控制
● 通讯协议
1、 安装Python底板驱动模块
2、 底层单片机I2C通讯协议
3、 App和机械臂通信协议
● 硬件资料
1、 硬件速查手册
2、 机械臂扩展版说明文档
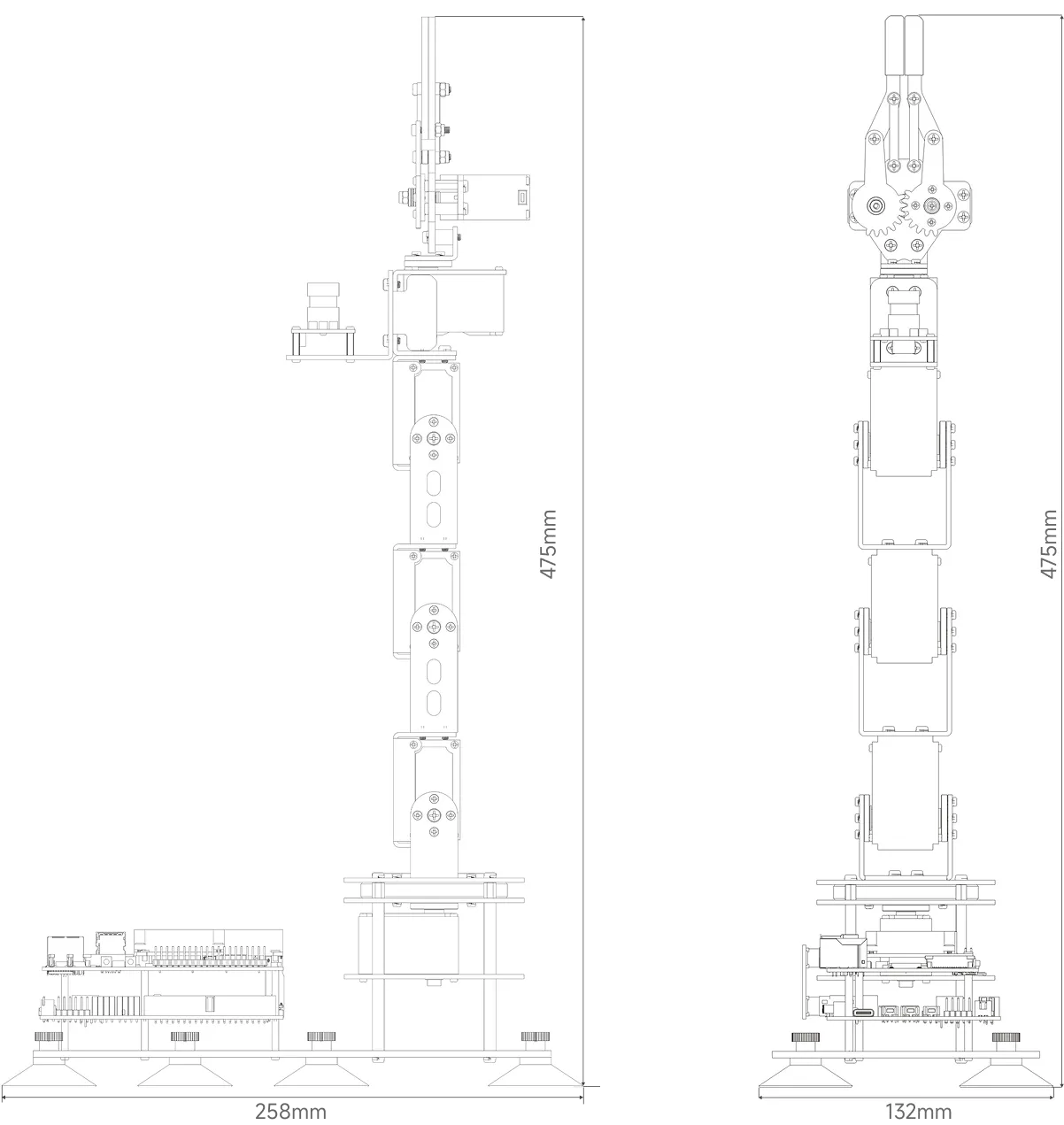
● 产品尺寸
● 规格参数
编程语言
Python
舵机方案
15KG*5+6KG*1
串行总线智能舵机
电源方案
20V3.25A(65W MAX)快充充电器
电源接口
Type-C接口
遥控方式
手机APP、有线手柄控制
通信方式
WiFi网络
安全保护
过流保护、反接保护
机械臂材质
阳极氧化铝合金
组装后尺寸
258*132*475mm
组装后重量
1115g
机械臂自由度
6自由度(含夹爪)
有效负载
200g(伸直可夹重量)
负载
500g(夹持搬运重量)
臂展
350mm
有效抓取范围
半径≤30cm 以中心轴为半圆区域
夹爪最大开合距离
6cm
重复定位精度
±0.5mm
摄像头
100万像素150度广角摄像头
分辨率
720p(1280×720)
帧率
30fps
对焦方式
固定焦距

关于橙子人工智能
橙子人工智能是潜心于智能化、实用化、娱乐化的机器人研产销一体化品牌服务商,隶属于深圳市迅龙软件有限公司,创建于2016年。作为一家机器人领域的创新企业,橙子人工智能依据机器学习、大数据分析、计算机视觉、语音和自然语言处理、智能体等技术,自主研发了扫地机器人、编程大师、哪吒机器人等系列家用机器人产品,并根据用户的喜好倾向、消费习惯和需求变动不断从感知、认知和行为控制三个技术层面进行迭代和升级,匹配产品属性和消费者属性,给用户带来生活的便捷和快乐。
